Este projeto permite controlar com facilidade o sentido de rotação de um motor usando um joystick. Você pode aplicar o circuito em uma cabeça robótica, um braço robótico ou qualquer outro mecanismo que exija movimento. A implementação é simples, veja abaixo.
Não sei se já mencionei isso antes, mas para visualizar a imagem em detalhes de qualquer projeto publicado, basta clicar sobre a figura. Imagino que já tenha percebido isso.
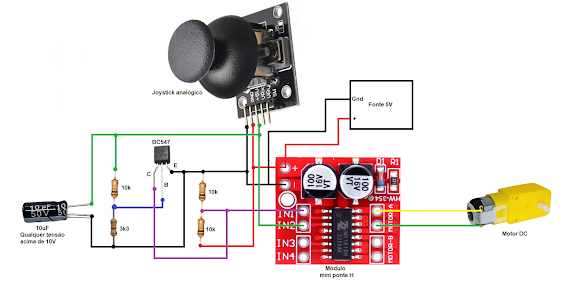
No circuito apresentado, utilizamos apenas um dos eixos do joystick (o eixo X), controlando assim apenas um motor. Para um controle completo nos eixos X e Y, basta replicar o circuito ao redor do transistor, usando também o terminal VRY do joystick, as entradas IN3 e IN4 do módulo ponte H, e a saída para o motor B.
Obrigado pelo projeto. Procurava algo assim bem simplificado para ligar minha câmera de vigilância com a caixa de redução.👍
ResponderExcluir