Da série : 10 circuitos . Agora o protagonismo fica por conta dos acopladores ópticos.
Os optoacopladores, também conhecidos como isoladores ópticos, são dispositivos eletrônicos que transferem sinais elétricos entre dois circuitos eletrônicos através da luz. Eles consistem basicamente de um emissor de luz (geralmente um LED) e um detector de luz (que pode ser um transistor, um SCR , um diac, triac, mosfets ou ainda uma porta lógica) encapsulados juntos. A luz emitida pelo LED é recebida pelo fotodetector, que converte a luz de volta em um sinal elétrico. Esse método de transferência proporciona isolamento elétrico entre os dois circuitos, protegendo-os contra interferências elétricas e surtos de tensão. Os optoacopladores são amplamente utilizados em diversas aplicações devido à sua capacidade de fornecer isolamento elétrico e proteger circuitos sensíveis.
Existem dezenas de modelos , mas nestes exemplos vamos usar apenas o PC817, o 4N40 e o 4N25. Pode substituí-los por outros modelos com a mesma função interna , se quiser.
Vamos lá, então?
1 - Provador sonoro de componentes.
Um teste de continuidade bem simples que permite provar componentes como fusíveis, leds, lâmpadas, chaves, diodos e verificar curtos em transistores ou capacitores.
2- Gerador de sons variados
Um led RGB piscante modula o optoacoplador que por sua vez modula o som de um buzzer ativo, gerando sons pseudoaleatórios.
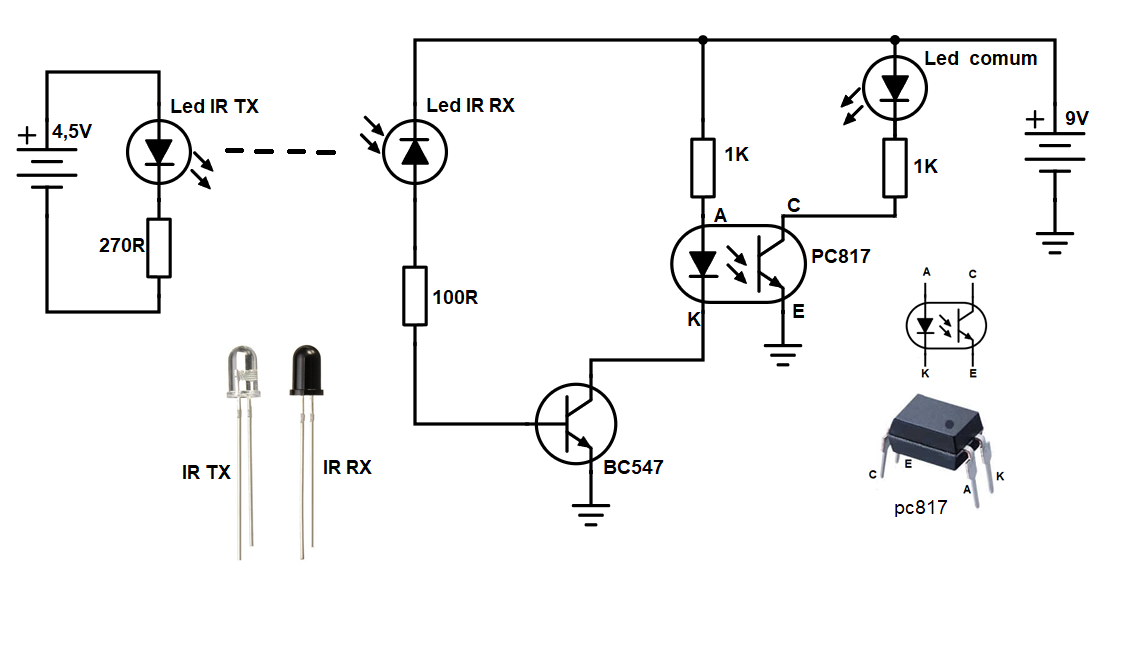
2- Barreira de infravermelho
Qualquer objeto que intercepte o feixe de luz que vai de TX a RX , causará o acendimento do led. O alcance deve chegar a uns 30 cm no máximo.
4 - Leds rítmicos
Sons próximos ao microfone, causam variações no brilho dos leds.
5- Senha eletrônica simples
O acionamento correto de uma combinação de chaves ( neste caso 2-5 -7 ) faz com que o led se ilumine. Chaves erradas impedem o funcionamento, mesmo que as corretas estejam acionadas.
6- Liga / Desliga no mesmo botão.
O título já disse tudo
7- Comando Bimanual de segurança
A carga ( no caso o led ) só é acionada se ambas as teclas forem acionadas ao mesmo tempo, ou com diferença de poucos milissegundos . Este sistema obriga o Operador a manter as duas mãos ocupadas, evitando acidentes . Circuito didático, não use em máquinas que ofereçam risco ao Operador.
8- Sensor de escuridão
Quando anoitecer ou se o LDR ficar sob baixa iluminação, o led começará a piscar.
9- Indicador de ambiente ocupado
Fixar o imã em uma porta, fechadura ou trinco por dentro . Quando fechar a porta, o imã se aproxima do reed e o display indica " O " de ocupado. Com a porta destrancada , o imã afasta e o display indica "L" de livre.
10- Jogo da velocidade
Aquele que apertar o botão mais rápido acende seu led e impede que o led do adversário acenda.